Terminal console
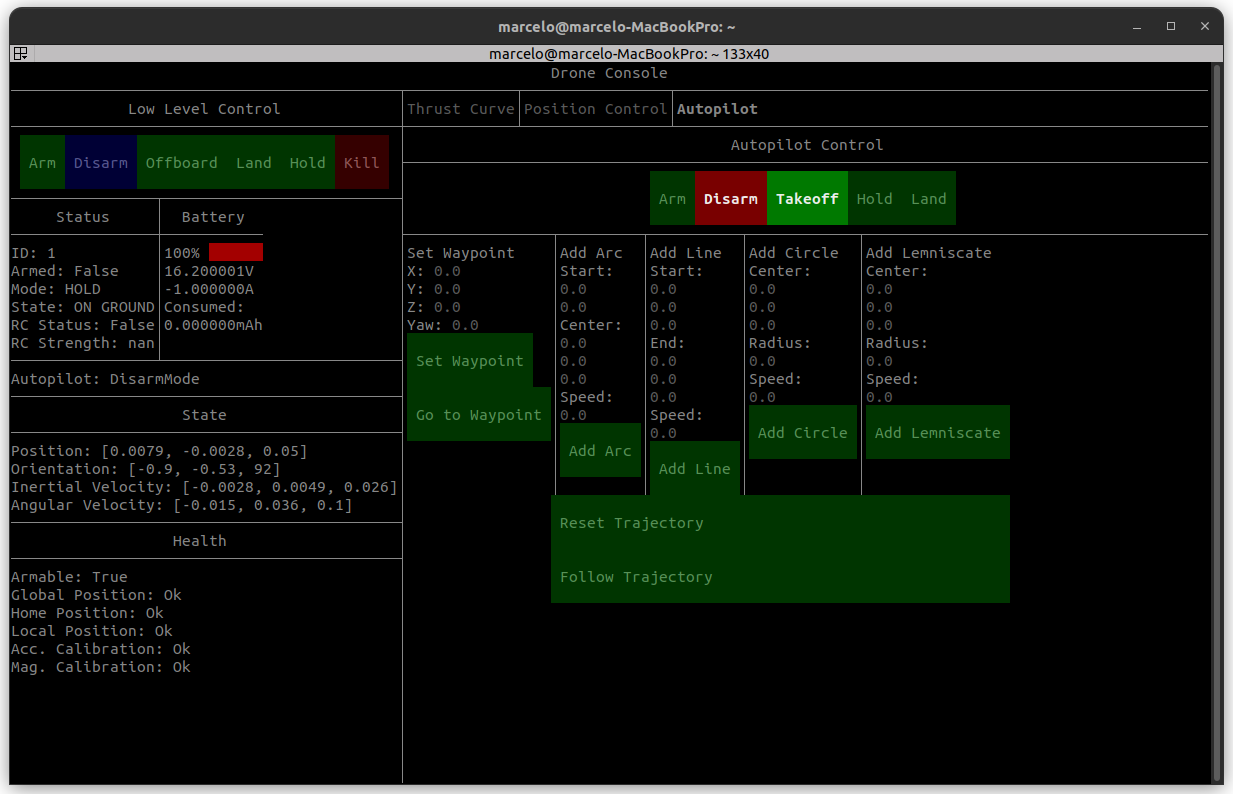
To execute the terminal console you need to run the following command:
ros2 run pegasus_console pegasus_console -i <vehicle_id> -n <namespace>
You should replace the <vehicle_id> with the vehicle id you want to connect to. If not option is provided, the console will attempt to connect to ID 1.
If you want to connect to a specific namespace, you should replace the <namespace> with the desired namespace. If no namespace is provided, the console will connect to the default namespace “drone”.